���ܙC���˳��ݽ�Q����
2021/6/8 9:53:21�c����
���ܙC���˳��ݽ�Q����
 �C���˳��݆��}
�C���˳��݆��}
1���C��������˹�Խ��Խ���V�����ã���ߵء����ա��Ͳ͡�Ѳ�z�ȣ�
2���C��������ԄӺ��ݣ�����ݺ��е���ǰ�njӣ�
3����ݵ��˙C��������Д��_�T�����_��λ�ˣ����������P(gu��n)�T��
4���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
5���M����ݺ�����ô�x��njӣ��������nj�ȥ��
6���C����Ҫȥ8�ǣ��Y(ji��)��6�������£��C������ô�Д�˕r���ܳ���ݣ�
�C���˰l(f��)��ָ��F(xi��n)��ݺ��ݣ�
��1���C����������⣬ͨ��Wifi���{����LoRa��Zigbee��2.4G��433M���Z����4G�W(w��ng)�j�Ȱl(f��)��ָ���������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c���Ϙǻ��ǰ��I�����F(xi��n)���ݹ��ܡ�
��2������ݵ��_��ǰ�njӣ��������ݿ�ϵ�y(t��ng)�Ԅӌ���ǰ����\��B(t��i)�����С����С��T���_�������P(gu��n)�T����Ϣ�l(f��)�ͽo�C���ˣ��Ա�C�������x�����_����M�롣
�C���˰l(f��)��ָ��F(xi��n)����x�ӣ�
��1���C�����M����ݺ�ͨ��Wifi���{����LoRa�� Zigbee��2.4G��433M���Z����4G�W(w��ng)�j�Ȱl(f��)�ͽo�������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c�������njӰ��I������l(f��)ȥ6��ָ��t6�ǰ��I�Ԅ��c��������͙C���ˆT��6�ǡ�
��2����;�����ͣ�����_�T���������ݿ�ϵ�y(t��ng)����ǰ���ͣ���njӔ�(sh��)���r�l(f��)�ͽo�C���ˣ�����C������ǰ����ݡ�
���������f��
��1�� �C���˵�����T�ڸ������l(f��)���������ָ��������ݿ�ϵ�y(t��ng)����(j��)�C���˰l(f��)��ָ�(sh��)��(j��)���c����ǰ�nj��ϰ��I�����°��I��
��2�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)ָ��o�������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B(t��i)�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
��3�� �C�����M������^�̿��Գ��m(x��)�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)�����F(xi��n)�c���_�T���o�����hÿ��һ�Σ�ֱ���C������ȫ�M����ݞ�ֹ��
��4�� �C������ȫ�M����ݺl(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)���c��Ҫȥ�ĘnjӰ��I���l(f��)���ꮅ�ȴ�����Ԅ��P(gu��n)�T�������h�C���˰l(f��)�P(gu��n)�Tָ���Щ��ݛ]�з��A���ܿ��ܕ����F(xi��n)�A����r��
��5�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)ָ���������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B(t��i)����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
��6�� �C���˳�����^�̿��Գ��m(x��)�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)���c���_�T���o��ÿ��һ�Σ�ֱ���C������ȫ����ݞ�ֹ��
�o������ư�C���˳�������
��1�� �C���˵�����T�ڸ������l(f��)�̓�(n��i)���c���njӰ��I(0x120A)ָ���c����ǰ�njӰ��I��
��2�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)(0x0024)ָ����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B(t��i)���˕r�������N��r��
a�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
b������T�_�˵��\�з�����Ҫȥ�Ęnjӷ��C���˿��Բ��M��ݣ�������P(gu��n)�T�ߺ�ע��Ҫ�ߺ�Űl(f��)ָ���Ȼ����ڮ�ǰ�nj������_�T��һֱ�l(f��)ָ���������ݲ��P(gu��n)�T����ݲ���Ҳ���ߣ��^�m(x��)�l(f��)��(n��i)���c���njӰ��I(0x120A)ָ���c����ǰ�njӰ��I��ֱ���з����ǙC����Ҫȥ�ķ���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݡ�����C������8��Ҫ��1�ǣ��Y(ji��)���������������20�ǵ���݁��ˣ�8���TҲ���_���C���˵�����ߺ��ٰl(f��)�c��8��ָ�������ݵ���플Ӻ�������а��I�����C���˴˕r��Ҫ�Д�����_ʼ�����������c��1�ǡ��ٱ���C������8��Ҫ��9�ǣ���ǰ������˳���Ҫ������Ҫȥ1�ǣ�����8������T�_������磬����ݵ�1�Ǻ�������ݰ��I�������磬�C������Ҫ�����c��9�ǣ���ݟ����ݿ�ϵ�y(t��ng)�ǟo���z�y���C���˴˕r��Ҫ�Д�����_ʼ�����������c��9�ǡ�
c������T�_�˵��\�з�����Ҫȥ�Ęnjӷ���Ҳ�����M��ݣ��������һֱ����ǰ����������Ҫȥ�Ęnjӣ�Ȼ����ȥ�C����Ҫȥ�njӡ�����C������8��Ҫ��1�ǣ��Y(ji��)����������݁��ˣ�8���TҲ���_���C�����M��ݺ��ٰl(f��)�c��1��ָ�������ݵ���플Ӻ�������а��I�����C���˴˕r��Ҫ�Д�����_ʼ�����������c��1�ǡ��ٱ���C������8��Ҫ��9�ǣ���ǰ������˳���������ȥ1�ǣ�����8�ǙC�����M��ݣ�����ݵ�1�Ǻ����������ݰ��I�������磬�C������Ҫ�����c��9�ǣ���ݟ����ݿ�ϵ�y(t��ng)�ǟo���z�y����˙C���˴˕r��Ҫ�Д�����_ʼ�����������c��9�ǡ�
��3�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)(0x0024)ָ����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B(t��i)����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
��4�� �C���˳�����^�̿��Գ��m(x��)�l(f��)�̓�(n��i)���c���njӰ��I(0x120A)ָ���c���_�T���o��ÿ��һ�Σ�ֱ���C������ȫ����ݞ�ֹ��
 �C�����_�T
�C�����_�T
�C�����_�T�����_ƽ���T�ڣ��o�������T��ϵ�y(t��ng)�l(f��)���_�Tָ�ƽ���T�ԄӴ��_��
 �C�����^����ͨ���l
�C�����^����ͨ���l
�C�����^�l�C�����_�l�C߅�ϣ��o�������l�C����ϵ�y(t��ng)�l(f��)���_�lָ��l�C�ԄӴ��_��
 �������C���˳���Ӳ����(y��u)��
�������C���˳���Ӳ����(y��u)��
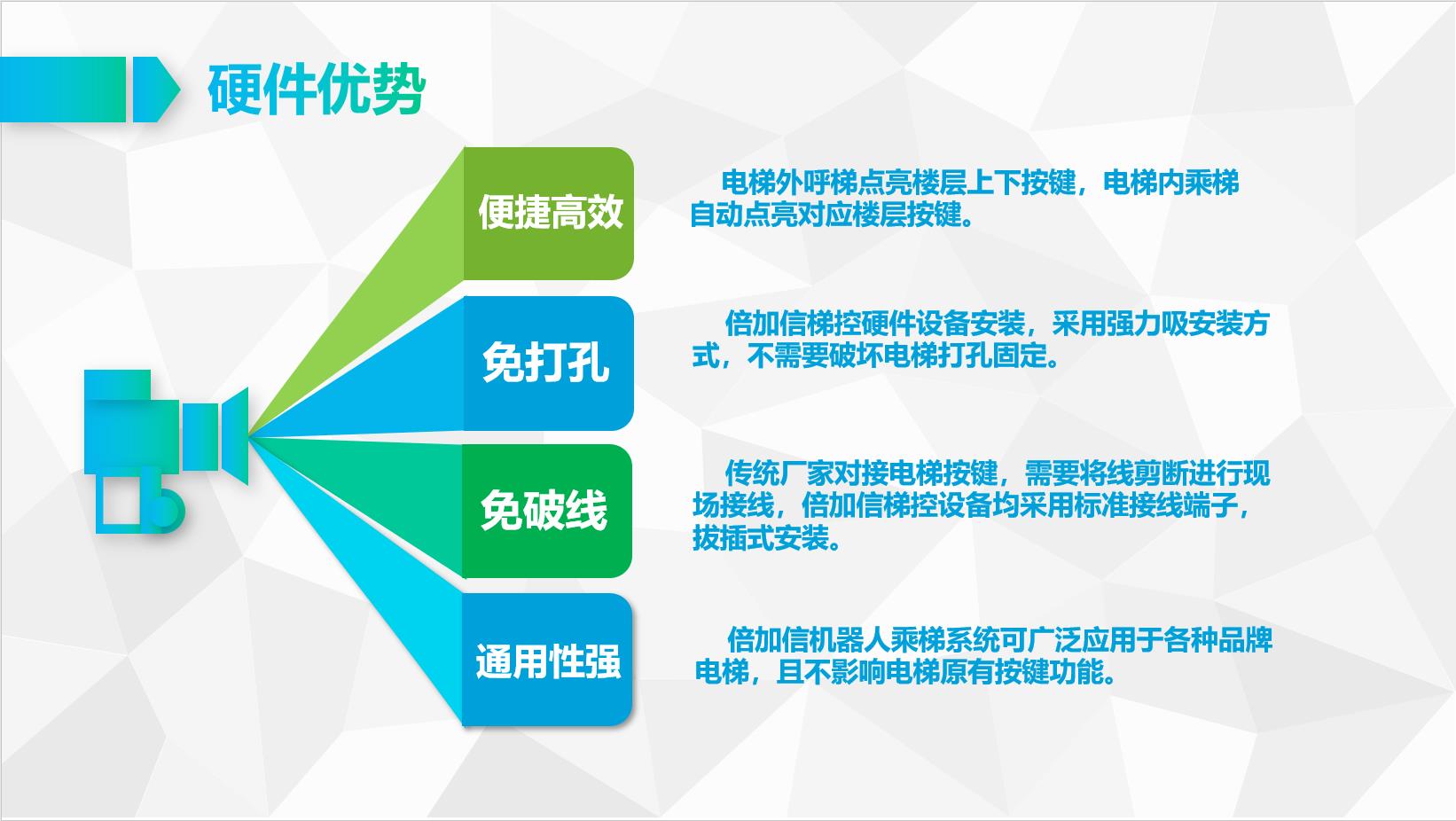
��1�����������c���nj����°��I����݃�(n��i)�����Ԅ��c�������njӰ��I��
��2���������ݿ�Ӳ���O�䰲�b�����Ï��������b��ʽ������Ҫ�Ɖ���ݴ�̶���
��3�����y(t��ng)�S�Ҍ�����ݰ��I����Ҫ���������M�ЬF(xi��n)���Ӿ����������ݿ��O������ؘʽӾ����ӣ��β�ʽ���b��
��4���������C���˳���ϵ�y(t��ng)�ɏV�������ڸ��NƷ����ݣ��Ҳ�Ӱ����ԭ�а��I���ܡ�
�ݿ���������
��1��ÿ�����һ�ף����b����ݰ��I����
��2���o���ף����Ï��������b��ʽ��
��3���˜��ž��β�ʽ�Ӿ������b��ݡ�
��4���c�C���ˌ��rͨ�ţ����ՙC����ָ��F(xi��n)�����x�ӡ�
���(li��n)�W(w��ng)������
��1�����r�C������������
��2���c������I������485ͨӍ��(li��n)��(li��n)
��3�����W(w��ng)�ڣ���W(w��ng)���c�C����TCP/IPͨӍ
������I���ư�
��1�����ݣ���������°��I����ÿ��һ�ס�
��2���o���ף����Ï��������b��ʽ��
��3��ÿ���O����ô�(li��n)��ʽ��
��ݠ�B(t��i)�z�y��
��1�����r�z�y���������B(t��i)
��2�����r�O(ji��n)�y����_�P(gu��n)�T��B(t��i)
��3�����r�z�y��ݮ�ǰͣ���nj���Ϣ
��ݠ�B(t��i)�z�y�н�Q�C���˳��������}��
a����ݵ��˙C��������Д��_�T�����_��λ�ˣ�������������P(gu��n)�T�����ܙC����߀�]�M���˰����P(gu��n)�T���I����
b���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
c���C����Ҫȥ8�ǣ��Y(ji��)��6�������£��C������ô�Д�˕r���ܳ���ݣ�
��(li��n)�����ݿ�����
��1���c�C���˹�˾�Ʒ�����ͨӍ
��2�����ՙC���˺��ݺͳ���ָ��
��3���{(di��o)������F(xi��n)����
1���C��������˹�Խ��Խ���V�����ã���ߵء����ա��Ͳ͡�Ѳ�z�ȣ�
2���C��������ԄӺ��ݣ�����ݺ��е���ǰ�njӣ�
3����ݵ��˙C��������Д��_�T�����_��λ�ˣ����������P(gu��n)�T��
4���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
5���M����ݺ�����ô�x��njӣ��������nj�ȥ��
6���C����Ҫȥ8�ǣ��Y(ji��)��6�������£��C������ô�Д�˕r���ܳ���ݣ�
�C���˰l(f��)��ָ��F(xi��n)��ݺ��ݣ�
��1���C����������⣬ͨ��Wifi���{����LoRa��Zigbee��2.4G��433M���Z����4G�W(w��ng)�j�Ȱl(f��)��ָ���������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c���Ϙǻ��ǰ��I�����F(xi��n)���ݹ��ܡ�
��2������ݵ��_��ǰ�njӣ��������ݿ�ϵ�y(t��ng)�Ԅӌ���ǰ����\��B(t��i)�����С����С��T���_�������P(gu��n)�T����Ϣ�l(f��)�ͽo�C���ˣ��Ա�C�������x�����_����M�롣
�C���˰l(f��)��ָ��F(xi��n)����x�ӣ�
��1���C�����M����ݺ�ͨ��Wifi���{����LoRa�� Zigbee��2.4G��433M���Z����4G�W(w��ng)�j�Ȱl(f��)�ͽo�������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c�������njӰ��I������l(f��)ȥ6��ָ��t6�ǰ��I�Ԅ��c��������͙C���ˆT��6�ǡ�
��2����;�����ͣ�����_�T���������ݿ�ϵ�y(t��ng)����ǰ���ͣ���njӔ�(sh��)���r�l(f��)�ͽo�C���ˣ�����C������ǰ����ݡ�
���������f��
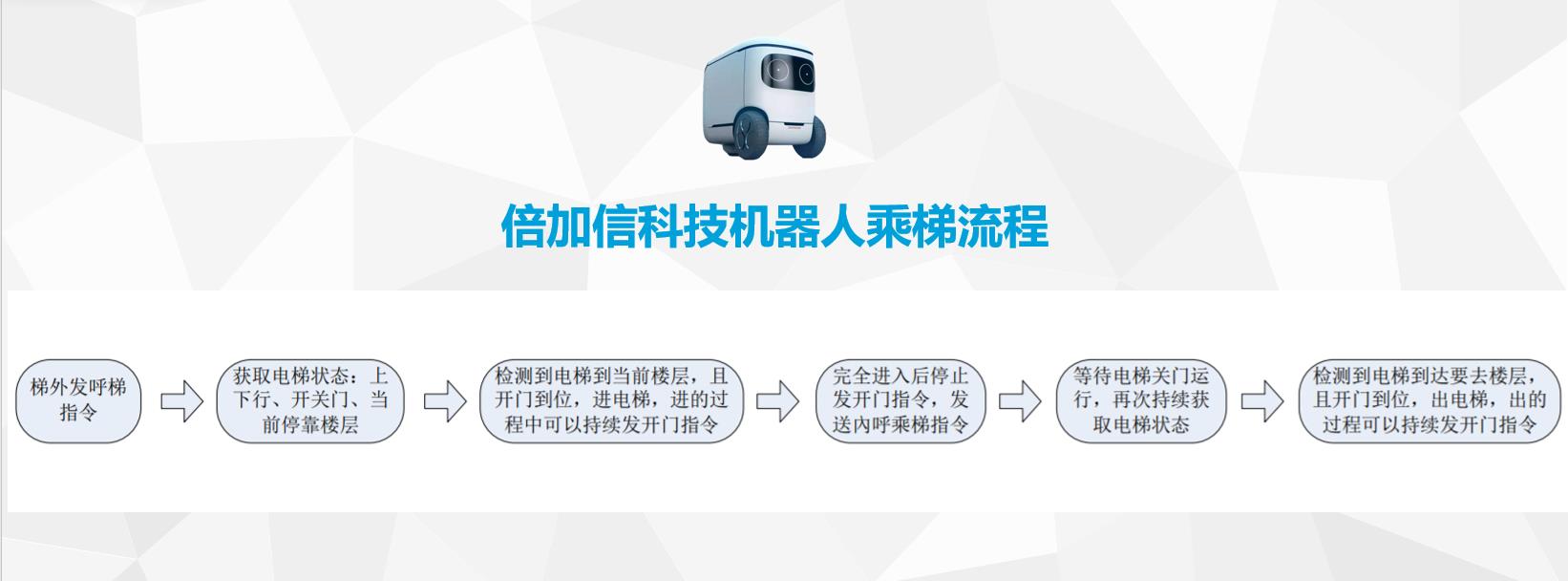
��1�� �C���˵�����T�ڸ������l(f��)���������ָ��������ݿ�ϵ�y(t��ng)����(j��)�C���˰l(f��)��ָ�(sh��)��(j��)���c����ǰ�nj��ϰ��I�����°��I��
��2�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)ָ��o�������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B(t��i)�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
��3�� �C�����M������^�̿��Գ��m(x��)�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)�����F(xi��n)�c���_�T���o�����hÿ��һ�Σ�ֱ���C������ȫ�M����ݞ�ֹ��
��4�� �C������ȫ�M����ݺl(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)���c��Ҫȥ�ĘnjӰ��I���l(f��)���ꮅ�ȴ�����Ԅ��P(gu��n)�T�������h�C���˰l(f��)�P(gu��n)�Tָ���Щ��ݛ]�з��A���ܿ��ܕ����F(xi��n)�A����r��
��5�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)ָ���������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B(t��i)����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
��6�� �C���˳�����^�̿��Գ��m(x��)�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)���c���_�T���o��ÿ��һ�Σ�ֱ���C������ȫ����ݞ�ֹ��
�o������ư�C���˳�������
��1�� �C���˵�����T�ڸ������l(f��)�̓�(n��i)���c���njӰ��I(0x120A)ָ���c����ǰ�njӰ��I��
��2�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)(0x0024)ָ����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B(t��i)���˕r�������N��r��
a�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
b������T�_�˵��\�з�����Ҫȥ�Ęnjӷ��C���˿��Բ��M��ݣ�������P(gu��n)�T�ߺ�ע��Ҫ�ߺ�Űl(f��)ָ���Ȼ����ڮ�ǰ�nj������_�T��һֱ�l(f��)ָ���������ݲ��P(gu��n)�T����ݲ���Ҳ���ߣ��^�m(x��)�l(f��)��(n��i)���c���njӰ��I(0x120A)ָ���c����ǰ�njӰ��I��ֱ���з����ǙC����Ҫȥ�ķ���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݡ�����C������8��Ҫ��1�ǣ��Y(ji��)���������������20�ǵ���݁��ˣ�8���TҲ���_���C���˵�����ߺ��ٰl(f��)�c��8��ָ�������ݵ���플Ӻ�������а��I�����C���˴˕r��Ҫ�Д�����_ʼ�����������c��1�ǡ��ٱ���C������8��Ҫ��9�ǣ���ǰ������˳���Ҫ������Ҫȥ1�ǣ�����8������T�_������磬����ݵ�1�Ǻ�������ݰ��I�������磬�C������Ҫ�����c��9�ǣ���ݟ����ݿ�ϵ�y(t��ng)�ǟo���z�y���C���˴˕r��Ҫ�Д�����_ʼ�����������c��9�ǡ�
c������T�_�˵��\�з�����Ҫȥ�Ęnjӷ���Ҳ�����M��ݣ��������һֱ����ǰ����������Ҫȥ�Ęnjӣ�Ȼ����ȥ�C����Ҫȥ�njӡ�����C������8��Ҫ��1�ǣ��Y(ji��)����������݁��ˣ�8���TҲ���_���C�����M��ݺ��ٰl(f��)�c��1��ָ�������ݵ���플Ӻ�������а��I�����C���˴˕r��Ҫ�Д�����_ʼ�����������c��1�ǡ��ٱ���C������8��Ҫ��9�ǣ���ǰ������˳���������ȥ1�ǣ�����8�ǙC�����M��ݣ�����ݵ�1�Ǻ����������ݰ��I�������磬�C������Ҫ�����c��9�ǣ���ݟ����ݿ�ϵ�y(t��ng)�ǟo���z�y����˙C���˴˕r��Ҫ�Д�����_ʼ�����������c��9�ǡ�
��3�� �C�����_ʼ�l(f��)���x����\�Р�B(t��i)(0x0024)ָ����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B(t��i)����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
��4�� �C���˳�����^�̿��Գ��m(x��)�l(f��)�̓�(n��i)���c���njӰ��I(0x120A)ָ���c���_�T���o��ÿ��һ�Σ�ֱ���C������ȫ����ݞ�ֹ��
�C�����_�T�����_ƽ���T�ڣ��o�������T��ϵ�y(t��ng)�l(f��)���_�Tָ�ƽ���T�ԄӴ��_��
�C�����^�l�C�����_�l�C߅�ϣ��o�������l�C����ϵ�y(t��ng)�l(f��)���_�lָ��l�C�ԄӴ��_��
��1�����������c���nj����°��I����݃�(n��i)�����Ԅ��c�������njӰ��I��
��2���������ݿ�Ӳ���O�䰲�b�����Ï��������b��ʽ������Ҫ�Ɖ���ݴ�̶���
��3�����y(t��ng)�S�Ҍ�����ݰ��I����Ҫ���������M�ЬF(xi��n)���Ӿ����������ݿ��O������ؘʽӾ����ӣ��β�ʽ���b��
��4���������C���˳���ϵ�y(t��ng)�ɏV�������ڸ��NƷ����ݣ��Ҳ�Ӱ����ԭ�а��I���ܡ�
�ݿ���������
��1��ÿ�����һ�ף����b����ݰ��I����
��2���o���ף����Ï��������b��ʽ��
��3���˜��ž��β�ʽ�Ӿ������b��ݡ�
��4���c�C���ˌ��rͨ�ţ����ՙC����ָ��F(xi��n)�����x�ӡ�
���(li��n)�W(w��ng)������
��1�����r�C������������
��2���c������I������485ͨӍ��(li��n)��(li��n)
��3�����W(w��ng)�ڣ���W(w��ng)���c�C����TCP/IPͨӍ
������I���ư�
��1�����ݣ���������°��I����ÿ��һ�ס�
��2���o���ף����Ï��������b��ʽ��
��3��ÿ���O����ô�(li��n)��ʽ��
��ݠ�B(t��i)�z�y��
��1�����r�z�y���������B(t��i)
��2�����r�O(ji��n)�y����_�P(gu��n)�T��B(t��i)
��3�����r�z�y��ݮ�ǰͣ���nj���Ϣ
��ݠ�B(t��i)�z�y�н�Q�C���˳��������}��
a����ݵ��˙C��������Д��_�T�����_��λ�ˣ�������������P(gu��n)�T�����ܙC����߀�]�M���˰����P(gu��n)�T���I����
b���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
c���C����Ҫȥ8�ǣ��Y(ji��)��6�������£��C������ô�Д�˕r���ܳ���ݣ�
��(li��n)�����ݿ�����
��1���c�C���˹�˾�Ʒ�����ͨӍ
��2�����ՙC���˺��ݺͳ���ָ��
��3���{(di��o)������F(xi��n)����
- ��һƪ�����ܙC����WIFIͨ�ų��ݽ�Q���� 2021/6/8
- ��һƪ����ݼ��b�ƿ܇�M����݄e�z���^���Ƿ���Ҫ��늄�܇���� 2021/6/4

 �����W(w��ng)���� 44030602004070̖
�����W(w��ng)���� 44030602004070̖