���������ܙC����LoRaͨӍ���ݽ�Q����
2021/6/10 7:48:05�c����
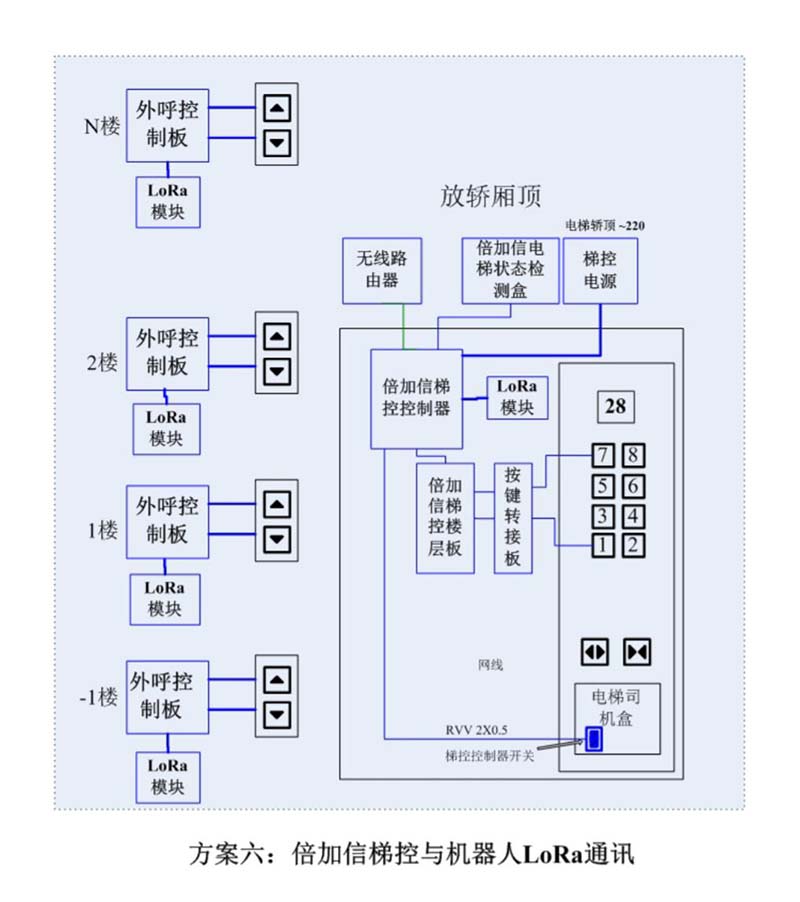
���������ܙC����LoRaͨӍ���ݽ�Q����
�C����Ŀǰ���V�������ڸ��и��I(y��)���C���˳��݆��}����ͻ����Ŀǰ��ͨ���������}��
1���C��������˹�Խ��Խ���V�����ã���ߵء����ա��Ͳ͡�Ѳ�z�ȣ�
2���M����ݺ���ô�x��njӣ��������nj�ȥ��
3����ݵ��˙C��������Д��_�T�����_��λ�ˣ����������P�T��
4���C��������ԄӺ��ݣ�����ݺ��е���ǰ�njӣ�
5���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
6���C����Ҫȥ8�ǣ��Y(ji��)��6�������£��C������ô�Д�˕r���ܳ���ݣ�
LoRa��semtech��˾��(chu��ng)���ĵ��ľ���W(w��ng)�o���˜ʣ�����һ����y���w�h���x���h���xһ�㹦�ĸߣ�Ҫ���R�����Բ�߀Ҫ�ܵ��h�������y���k����LoRa�����־����h���x�o��늣�Long Range Radio������������c������ͬ�ӵĹ��ėl���±������o����ʽ�����ľ��x���h�����F(xi��n)�˵��ĺ��h���x�Ľy(t��ng)һ������ͬ�ӵĹ����±Ȃ��y(t��ng)�ğo�����lͨ�ž��x�U��3-5����
�C���˰l(f��)��ָ��F(xi��n)��ݺ��ݣ�
��1���C����������⣬ͨ�^LoRaͨӍ�l(f��)��ָ���������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c���Ϙǻ��ǰ��I�����F(xi��n)���ݹ��ܡ�
��2������ݵ��_��ǰ�njӣ��������ݿ�ϵ�y(t��ng)�Ԅӌ���ǰ����\��B(t��i)�����С����С��T���_�������P�T����Ϣ�l(f��)�ͽo�C���ˣ��Ա�C�������x�����_����M�롣
 �C���˰l(f��)��ָ��F(xi��n)����x�ӣ�
�C���˰l(f��)��ָ��F(xi��n)����x�ӣ�
��1���C�����M����ݺ�ͨ�^LoRaͨӍ�l(f��)�ͽo�������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c�������njӰ��I������l(f��)ȥ6��ָ��t6�ǰ��I�Ԅ��c��������͙C���ˆT��6�ǡ�
��2����;�����ͣ�����_�T���������ݿ�ϵ�y(t��ng)����ǰ���ͣ���njӔ�(sh��)���r�l(f��)�ͽo�C���ˣ�����C������ǰ����ݡ�
���������f��
��1�� �C���˵�����T�ڸ�����LoRaͨӍ�l(f��)���������ָ��������ݿ�ϵ�y(t��ng)����(j��)�C���˰l(f��)��ָ�(sh��)��(j��)���c����ǰ�nj��ϰ��I�����°��I��
��2�� �C����LoRaͨӍ�_ʼ�l(f��)���x����\�Р�B(t��i)ָ��o�������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B(t��i)�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
��3�� �C�����M������^�̿���LoRaͨӍ���m(x��)�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)�����F(xi��n)�c���_�T���o�����hÿ��һ�Σ�ֱ���C������ȫ�M����ݞ�ֹ��
��4�� �C������ȫ�M����ݺ�LoRaͨӍ�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)���c��Ҫȥ�ĘnjӰ��I���l(f��)���ꮅ�ȴ�����Ԅ��P�T�������h�C���˰l(f��)�P�Tָ���Щ��ݛ]�з��A���ܿ��ܕ����F(xi��n)�A����r��
��5�� �C�����_ʼLoRaͨӍ�l(f��)���x����\�Р�B(t��i)ָ���������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B(t��i)����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
��6�� �C���˳�����^�̿���LoRaͨӍ���m(x��)�l(f��)���_�Tָ��o�������ݿ�ϵ�y(t��ng)���c���_�T���o��ÿ��һ�Σ�ֱ���C������ȫ����ݞ�ֹ��
�������Ƽ����ЙC����WIFI���ݡ��C�����{�����ݡ��C������ͨӍ���ݡ��C����Zigbee���ݡ��C����2.4G���ݡ��C����433M���ݡ��C�����Z�����ݡ��C����5G���ݵȳ��ݽ�Q������
�C����Ŀǰ���V�������ڸ��и��I(y��)���C���˳��݆��}����ͻ����Ŀǰ��ͨ���������}��
1���C��������˹�Խ��Խ���V�����ã���ߵء����ա��Ͳ͡�Ѳ�z�ȣ�
2���M����ݺ���ô�x��njӣ��������nj�ȥ��
3����ݵ��˙C��������Д��_�T�����_��λ�ˣ����������P�T��
4���C��������ԄӺ��ݣ�����ݺ��е���ǰ�njӣ�
5���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
6���C����Ҫȥ8�ǣ��Y(ji��)��6�������£��C������ô�Д�˕r���ܳ���ݣ�
LoRa��semtech��˾��(chu��ng)���ĵ��ľ���W(w��ng)�o���˜ʣ�����һ����y���w�h���x���h���xһ�㹦�ĸߣ�Ҫ���R�����Բ�߀Ҫ�ܵ��h�������y���k����LoRa�����־����h���x�o��늣�Long Range Radio������������c������ͬ�ӵĹ��ėl���±������o����ʽ�����ľ��x���h�����F(xi��n)�˵��ĺ��h���x�Ľy(t��ng)һ������ͬ�ӵĹ����±Ȃ��y(t��ng)�ğo�����lͨ�ž��x�U��3-5����
�C���˰l(f��)��ָ��F(xi��n)��ݺ��ݣ�
��1���C����������⣬ͨ�^LoRaͨӍ�l(f��)��ָ���������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c���Ϙǻ��ǰ��I�����F(xi��n)���ݹ��ܡ�
��2������ݵ��_��ǰ�njӣ��������ݿ�ϵ�y(t��ng)�Ԅӌ���ǰ����\��B(t��i)�����С����С��T���_�������P�T����Ϣ�l(f��)�ͽo�C���ˣ��Ա�C�������x�����_����M�롣
��1���C�����M����ݺ�ͨ�^LoRaͨӍ�l(f��)�ͽo�������ݿ�ϵ�y(t��ng)��ϵ�y(t��ng)�Ԅ��c�������njӰ��I������l(f��)ȥ6��ָ��t6�ǰ��I�Ԅ��c��������͙C���ˆT��6�ǡ�
��2����;�����ͣ�����_�T���������ݿ�ϵ�y(t��ng)����ǰ���ͣ���njӔ�(sh��)���r�l(f��)�ͽo�C���ˣ�����C������ǰ����ݡ�
���������f��
��1�� �C���˵�����T�ڸ�����LoRaͨӍ�l(f��)���������ָ��������ݿ�ϵ�y(t��ng)����(j��)�C���˰l(f��)��ָ�(sh��)��(j��)���c����ǰ�nj��ϰ��I�����°��I��
��2�� �C����LoRaͨӍ�_ʼ�l(f��)���x����\�Р�B(t��i)ָ��o�������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B(t��i)�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
��3�� �C�����M������^�̿���LoRaͨӍ���m(x��)�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)�����F(xi��n)�c���_�T���o�����hÿ��һ�Σ�ֱ���C������ȫ�M����ݞ�ֹ��
��4�� �C������ȫ�M����ݺ�LoRaͨӍ�l(f��)�̓�(n��i)���c���njӰ��Iָ��o�������ݿ�ϵ�y(t��ng)���c��Ҫȥ�ĘnjӰ��I���l(f��)���ꮅ�ȴ�����Ԅ��P�T�������h�C���˰l(f��)�P�Tָ���Щ��ݛ]�з��A���ܿ��ܕ����F(xi��n)�A����r��
��5�� �C�����_ʼLoRaͨӍ�l(f��)���x����\�Р�B(t��i)ָ���������ݿ�ϵ�y(t��ng)�����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B(t��i)����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
��6�� �C���˳�����^�̿���LoRaͨӍ���m(x��)�l(f��)���_�Tָ��o�������ݿ�ϵ�y(t��ng)���c���_�T���o��ÿ��һ�Σ�ֱ���C������ȫ����ݞ�ֹ��
�������Ƽ����ЙC����WIFI���ݡ��C�����{�����ݡ��C������ͨӍ���ݡ��C����Zigbee���ݡ��C����2.4G���ݡ��C����433M���ݡ��C�����Z�����ݡ��C����5G���ݵȳ��ݽ�Q������
- ��һƪ�����������ܙC����ZigBeeͨӍ���ݽ�Q���� 2021/6/10
- ��һƪ�����ܙC�����Ƴ��ݽ�Q���������ſƼ� 2021/6/9

 �����W(w��ng)���� 44030602004070̖
�����W(w��ng)���� 44030602004070̖